This is an old revision of the document!
Maustasten belegen
Linux Mint (bzw. Ubuntu)
https://help.ubuntu.com/community/ManyButtonsMouseHowto
sudo apt-get install imwheel
Button 10 ist die Daumentaste.
/etc/X11/imwheel/startup.conf:
IMWHEEL_START=1 IMWHEEL_PARAMS='-b "0 0 0 0 0 0 10"'
~/.imwheelrc:
".*" None, ExtBt7, Alt_L|F9
Und schließlich unter Einstellungen / Tastatur / Tastenkombinationen / Fenster / Fenster verkleinern
Alt + F9 einstellen (sollte aber auch Default sein).
Arch Linux
xorg-xev, xbindkeys und xdotool installieren:
pacman -S xbindkeys xdotool xorg-xev
mit xev Button Nummer herausfinden.
Maustasten mit xbindkeys auf Tastendrücke legen: ~./xbindkeysrc:
# Button 10 sends ALT+F9 "xdotool key alt+F9" b:10
xbindkeys automatisch beim Einloggen starten: ~/.xprofile:
xbindkeys &
In Desktop-Einstellungen ALT-F9 auf gewünschte Funktion, z.B. Fenster minimieren setzen.
Mausgeschwindigkeit einstellen
Per 'xset'.
Z.B.:
xset m 5/4 0
Das ganze dann als Startup definieren,
#cat ~/.config/autostart/mouse.desktop
[Desktop Entry] Name=Set mouse sensitivity Exec=xset m 5/4 0 Type=Application Comment=Use xset to set mouse params Comment[en_US]=Use xset to set mouse params Comment[de_DE]=Benutzt xset um die Maus-Geschwindigkeit einzustellen
Siehe auch: http://www.pontikis.net/blog/fix-mouse-sensitivity-ubuntu
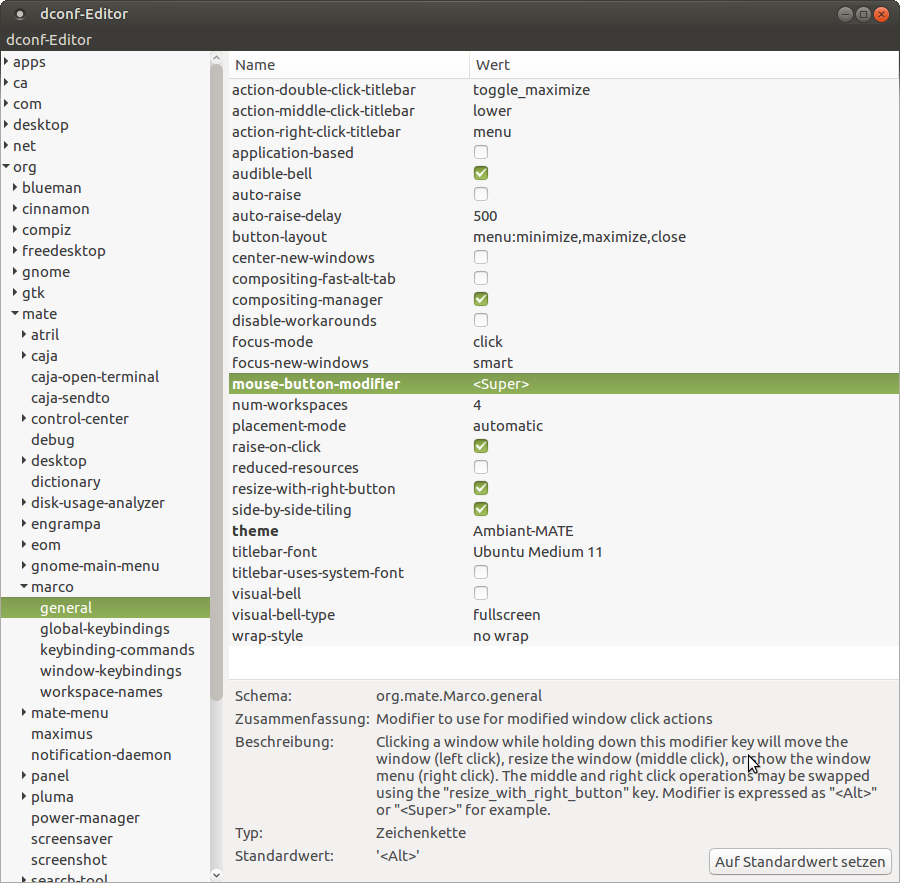
MATE Desktop: Window reize/move mit Windows (Super) Taste statt Alt
Arduino IDE unter Raspbian
https://github.com/arduino/Arduino/pull/4517
(http://downloads.arduino.cc/javaide/pull_requests/arduino-PR-4517-BUILD-514-linuxarm.tar.xz)
Einfach entpacken und ausführen.
Bluetooth RS232 Verbindung herstellen
$ sudo hcitool scan
Scanning …
00:02:C7:7D:F5:17 BlueGPS 7DF517
$ sudo rfcomm bind /dev/rfcomm0 00:02:C7:7D:F5:17 1
$ ls -l /dev/rfcomm0
crw-rw—- 1 root dialout 216, 0 2008-12-14 23:15 /dev/rfcomm0
Floppy auf 720 kB formatieren (USB-Laufwerk)
Von https://unix.stackexchange.com/questions/219533/how-to-format-720k-fat-ie-ms-dos-floppy-on-linux-using-usb-floppy-drive und https://fitzcarraldoblog.wordpress.com/2017/01/17/using-an-external-usb-3-5-inch-floppy-disk-drive-in-linux/
$ sudo ufiformat -f 720 -v /dev/xxx
Danach mit mkfs.msdos Filesystem erstellen oder per dd beschreiben.
$ sudo mkfs.msdos -I /dev/xxx
Git
# #
# Command line # Bitbucket (prefered)
# #
====================================== Create a new branch =====================================================
# Create and checkout branch Bitbucket: Create the branch in Bitbucket
git checkout -b <branch>
# Fetch the new branch and check it out
# Push (empty) branch to the remote repository git fetch
git push -u origin <branch> git checkout LSAS-0815_CoolFeature
# Do the work: edit, add, ...
# Commit the branch
git commit -m "Insert commit message here"
# Push branch to the remote repository
# ***********************************************************
# Note: From Pro Git book: "In general the way to get the best of both worlds is to rebase local changes
# you’ve made but haven’t shared yet before you push them in order to clean up your story, but never rebase
# anything you’ve pushed somewhere.
#
# => so better first commit locally until finished, then rebase and then push to origin.
# ***********************************************************
git push # Specify upstream if not already done above: git push -u origin <branch>
====================================== Rebase ==================================================================
# Update master copy
git checkout master
git pull
# go to branch which should be merged to master and make sure that remote is equal with your copy
git checkout <branch>
git pull # only if branch is already pushed to origin
# Start rebase
git rebase master
# solve conflicts with an editor e.g foo.cxx has a conflict
kate foo.cxx # remove conflict
git add foo.cxx
# continue rebasing
git rebase --continue
# if there are no other conflicts to solve, push your branch to remote otherwise solve conflicts
git push --force
====================================== Merge the branch with master ============================================
git checkout master Bitbucket: Create pull request
git merge <branch> Bitbucket: Merge
git push Bitbucket: Delete <branch>
LUKS
See: https://www.johannes-bauer.com/linux/luksipc/ https://johndoe31415.github.io/luksipc/ https://github.com/johndoe31415/luksipc # Find the right partition lsblk -o name,fstype,size nvme0n1 477G ├─nvme0n1p1 vfat 512M <== boot ├─nvme0n1p2 ext4 437,4G <== root └─nvme0n1p3 swap 39,1G # Set boot and root partition names, change to your setup! BOOTPART=/dev/nvme0n1p1 ROOTPART=/dev/nvme0n1p2 # Shrink root filesystem (NOT the partition) tune2fs -l $ROOTPART # Block count: 114655232 <== subtract 32768 (128 MB) e2fsck -f $ROOTPART sudo resize2fs $ROOTPART 114622464 # Block count - 32768 # Encrypt wget https://github.com/johndoe31415/luksipc/archive/master.zip unzip master.zip cd luksipc-master make sudo ./luksipc -d $ROOTPART # Add keyphrase sudo cryptsetup luksAddKey $ROOTPART --key-file=/root/initial_keyfile.bin # Let’s check this worked (slot 0 and 1 are populated) cryptsetup luksDump $ROOTPART # Let’s scrub the initial keyslot so the initial keyfile becomes useless cryptsetup luksKillSlot $ROOTPART 0 # And check again (slot 1 is empty) cryptsetup luksDump $ROOTPART # resize the filesystem to its original size sudo cryptsetup luksOpen $ROOTPART newcryptofs resize2fs /dev/mapper/newcryptofs # Make the system boot from the encrypted filesystem sudo mount /dev/mapper/newcryptofs /mnt sudo mount $BOOTPART /mnt/boot # Edit /etc/mkinitcpio.conf sudo nano /mnt/etc/mkinitcpio.conf # change MODULES=() to MODULES=(nvidia_uvm nvidia_drm) # set HOOKS to HOOKS=(base systemd autodetect keyboard keymap sd-vconsole modconf block sd-encrypt filesystems fsck) # Set the content of the file /boot/loader/loader.conf to echo -e "default arch\ntimeout 5\nconsole-mode max\n" | sudo dd of=/mnt/boot/loader/loader.conf echo -e "title Arch Linux\nlinux /vmlinuz-linux\ninitrd /intel-ucode.img\ninitrd /initramfs-linux.img\noptions rd.luks.name=$(lsblk $ROOTPART -o UUID -n -d)=cryptroot root=/dev/mapper/cryptroot nvidia-drm.modeset=1" | dd of=/mnt/boot/loader/entries/arch.conf sudo chroot /mnt mount -t proc proc /proc mount -t sysfs sys /sys mount -t devtmpfs udev /dev mkinitcpio -p linux exit # leave chroot # reboot